Variables
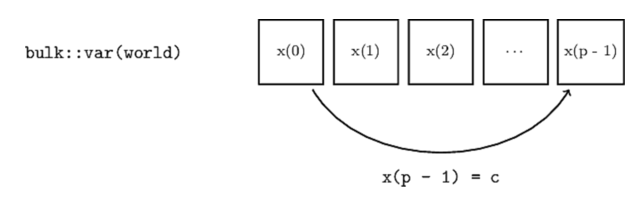
Now that we are able to set up the environment, and gained some familiarity with the world object that can be used to communicate with other processors, we are ready to discuss communication between processors. The most fundamental way of communicating between processors is using distributed variables. The variables can be created as follows:
auto x = bulk::var<int>(world);
Here we create a distributed variable that holds an integer. A distributed variable exists on every processor, but can have different values on different processors. These different local ‘copies’ are referred to as images of the variable. The variable lives within the world of the current SPMD section, and we explicitely write this by passing the world object as a parameter to the variable creation function.
While x refers to the local image of a variable, it is
identified with images on remote processors by the order in which
variables are constructed (which is possible because of the SPMD nature
of Bulk programs). This allows us to write to and read from remote
images of a variable by simply passing x to communication
functions.
Bulk synchronous communication
The main way to manipulate remote images of variables is using the
communication primitives bulk::put and
bulk::get for writing and reading respectively. For
example, to write the value 1 to the remote image held by
the next logical processor, we write:
bulk::put(world.next_rank(), 1, x);
To obtain the value of a remote image we write:
auto y = bulk::get(world.next_rank(), x);
Note
Equivalently, we can use the short-hand syntax: x(world.next_rank()) = 1 for putting, and auto y = x(world.next_rank()).get() for getting.
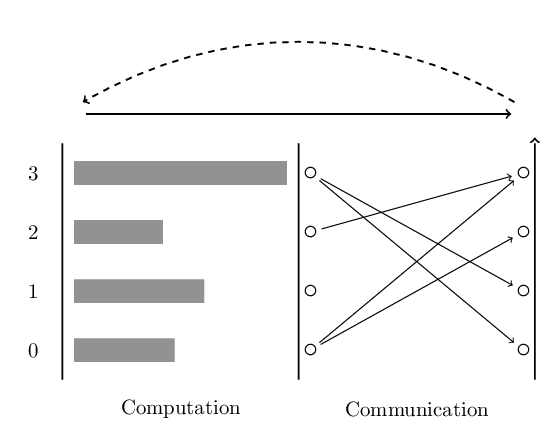
Initially, communication is only staged. This means that the values are not
valid immediately after the execution of the communication primitives.
Instead, they are available in the next ‘section’ of the program, known
as a (BSP) superstep. Supersteps can be viewed as the section of the
program within successive calls to world.sync(). This
barrier synchronization asserts that all processors have reached that
point of the program, and resolves all outstanding communication such as
those staged by calls to put and get. After the barrier synchronization
returns, all communication staged in the previous superstep is
guaranteed to have occurred.
In case of put, the remote image now contains the value written to it
(assuming that the local processor is the only one who wrote to that
specific remote image). For read requests using get, it is slightly
more complicated. The type of y is a
bulk::future<T>. A future object is a placeholder, that
will contain the correct value in the next superstep. This value can be
obtained after the synchronization using:
auto value = y.value();
This way of communicating is particularly useful when dealing with simple data objects. If instead we deal with distributed array-like objects, we recommend using coarrays, which are introduced in the next section.